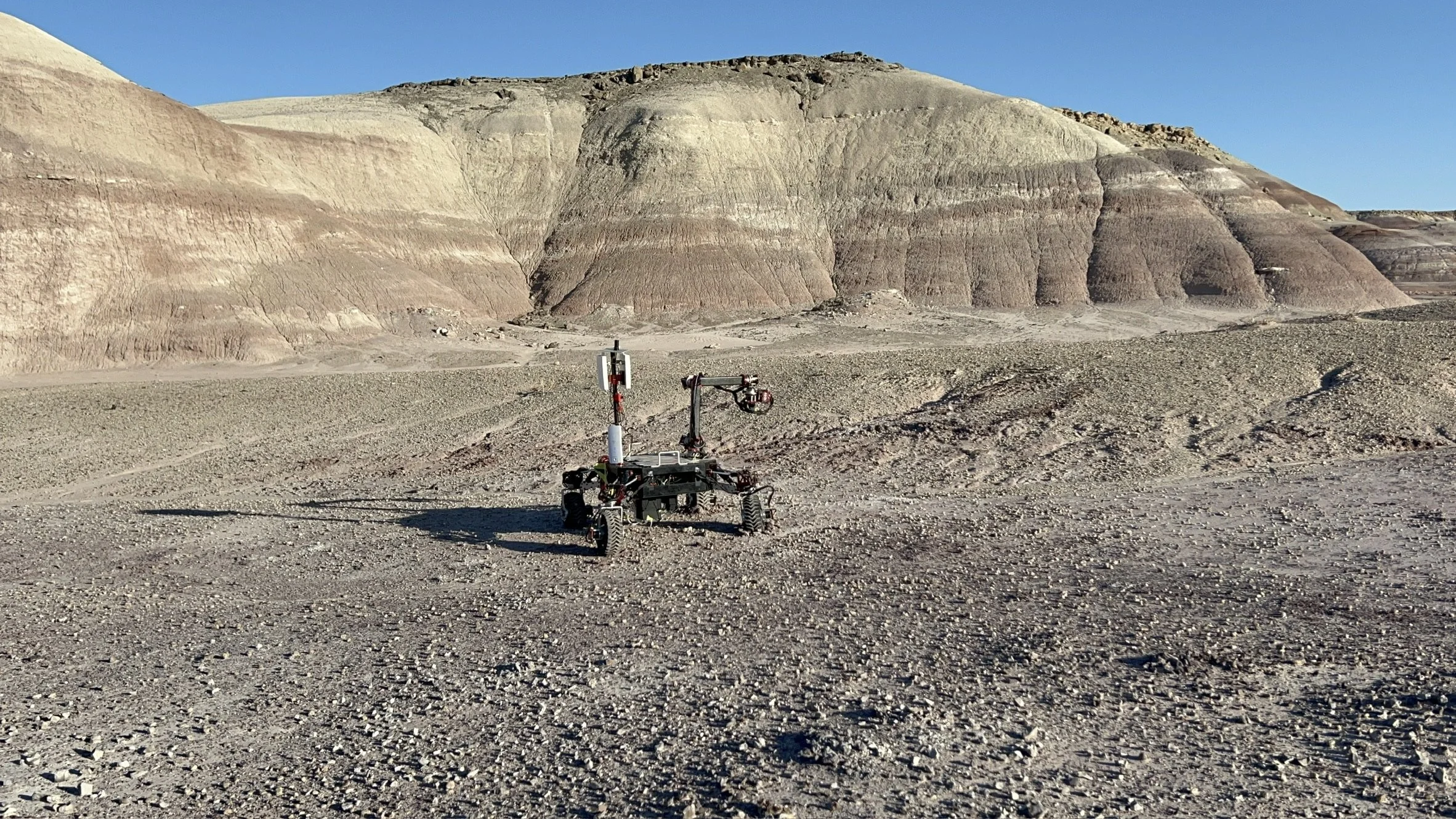
Cornell Mars Rover— Team Lead & Systems Engineer
Led a 60+ person team to design, build, and compete with a Mars rover at the University Rover Challenge in Utah. Oversaw rugged electromechanical systems, actuator integration, and wiring harnesses built for harsh desert conditions, while coordinating mechanical, electrical, and software subteams.

GreensKeeper: Automated Plant Care
An automated plant-care system using Raspberry Pi, sensors, pumps, and web-based controls to monitor and maintain soil moisture and lighting — all via a user-friendly dashboard.

Water Pump
I collaborated with four other students to research, design, manufacture, and test a water pump. We opted for a Scotch-Yoke piston pump design, which featured a two-sided, double-acting mechanism.

Analysis Chamber
The AstroTech sub-team on the Cornell Mars Rover (CMR) Project Team oversees the creation of a life-detecting chemical testing lab on the rover for the science portion of the University Rover Challenge. During this challenge, the rover collects samples from different sites and then analyzes these samples in-situ, providing our science team with the data required to decide on the presence of life.